Still many things there are to implement but this is already a good result.
Please see it at 1080p HD for a better resolution.

 Cassini will start obtaining the Earth part of the mosaic at 5:27 p.m. EDT (2:27 p.m. PDT or 21:27 UTC) and end about 15 minutes later, all while Saturn is eclipsing the sun from Cassini's point of view. The spacecraft's unique vantage point in Saturn's shadow will provide a special scientific opportunity to look at the planet's rings. At the time of the photo, North America and part of the Atlantic Ocean will be in sunlight.
Cassini will start obtaining the Earth part of the mosaic at 5:27 p.m. EDT (2:27 p.m. PDT or 21:27 UTC) and end about 15 minutes later, all while Saturn is eclipsing the sun from Cassini's point of view. The spacecraft's unique vantage point in Saturn's shadow will provide a special scientific opportunity to look at the planet's rings. At the time of the photo, North America and part of the Atlantic Ocean will be in sunlight.
 Porco and her imaging team associates examined Cassini's planned flight path for the remainder of its Saturn mission in search of a time when Earth would not be obstructed by Saturn or its rings. Working with other Cassini team members, they found the July 19 opportunity would permit the spacecraft to spend time in Saturn's shadow to duplicate the views from earlier in the mission to collect both visible and infrared imagery of the planet and its ring system.
Porco and her imaging team associates examined Cassini's planned flight path for the remainder of its Saturn mission in search of a time when Earth would not be obstructed by Saturn or its rings. Working with other Cassini team members, they found the July 19 opportunity would permit the spacecraft to spend time in Saturn's shadow to duplicate the views from earlier in the mission to collect both visible and infrared imagery of the planet and its ring system.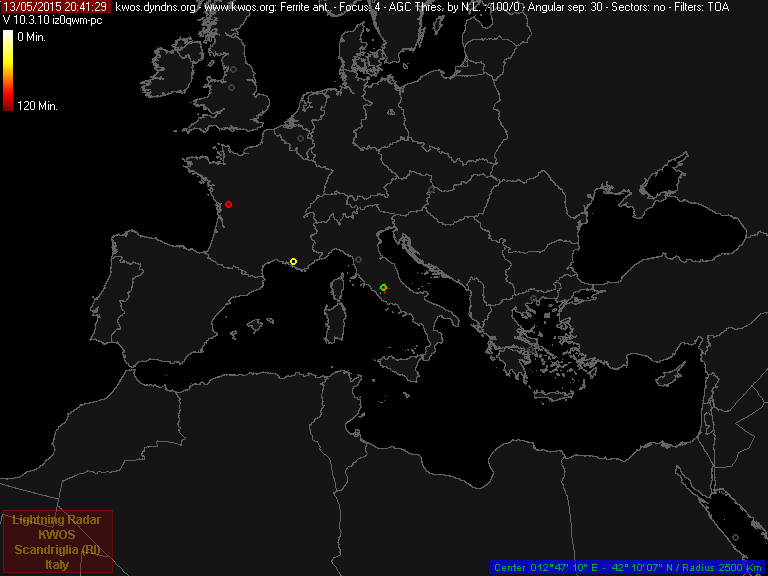

 The development of ADS-B software in Java continues. Another programmer has joined our group: i0kte, Stefano Ricciardetto. He is an expert on radar console, has worked for many years as a software programmer for the ATC.
The development of ADS-B software in Java continues. Another programmer has joined our group: i0kte, Stefano Ricciardetto. He is an expert on radar console, has worked for many years as a software programmer for the ATC.



 sight it will present to skywatchers but also because it will be the largest supermoon this year.
sight it will present to skywatchers but also because it will be the largest supermoon this year.


 Although observations continued after 1969, there seemed an indication that the meteor rates of 8 or 9 per hour had vanished. In 1971, about 215 hours of observations were acquired by 26 observers from Canada and the United States. The shower's ZHR irregularly varied during the period of June 10 to 24, with
Although observations continued after 1969, there seemed an indication that the meteor rates of 8 or 9 per hour had vanished. In 1971, about 215 hours of observations were acquired by 26 observers from Canada and the United States. The shower's ZHR irregularly varied during the period of June 10 to 24, with  Observations in 1974 indicated a resurgence of activity. The shower's discoverer, Dvorak, observed on four nights during mid-June, with the following average hourly rates (not ZHRs) being noted: June 14/15, 2.9, June 15/16, 6.5, June 16/17, 6.2, June 17/18, 2.3. Dvorak added that the meteors moved swiftly, with the majority being bluish-green. Also, in 1974, Nolthenius, Alan Devault and Bob Fischer (all of California) observed during 7 nights between June 9 and 22. Overall, they observed 32 June Lyrids, with the average magnitude being determined as 3.09. Slightly less than half of their total number of June Lyrids were seen on the shower's night of maximum (June 15/16). The average number of meteors seen from this radiant was 4 per hour.
Observations in 1974 indicated a resurgence of activity. The shower's discoverer, Dvorak, observed on four nights during mid-June, with the following average hourly rates (not ZHRs) being noted: June 14/15, 2.9, June 15/16, 6.5, June 16/17, 6.2, June 17/18, 2.3. Dvorak added that the meteors moved swiftly, with the majority being bluish-green. Also, in 1974, Nolthenius, Alan Devault and Bob Fischer (all of California) observed during 7 nights between June 9 and 22. Overall, they observed 32 June Lyrids, with the average magnitude being determined as 3.09. Slightly less than half of their total number of June Lyrids were seen on the shower's night of maximum (June 15/16). The average number of meteors seen from this radiant was 4 per hour.




 The rotation of the limacon creates an effective amplitude modulation of 30 Hz. The VOR receiver splits these two signals into the two original components. The two signals are processed through different channels and the phase of the 30 Hz modulations of the fixed REF signal and the VAR signal are compared in a phase comparator. The phase difference between these two signals is directly proportional to angular position with reference to the VOR station.
The rotation of the limacon creates an effective amplitude modulation of 30 Hz. The VOR receiver splits these two signals into the two original components. The two signals are processed through different channels and the phase of the 30 Hz modulations of the fixed REF signal and the VAR signal are compared in a phase comparator. The phase difference between these two signals is directly proportional to angular position with reference to the VOR station. 
PURPOSE OF THE EQUIPMENTTo facilitate en-route navigation along selected radials and to provide references for holding and let-down procedures.PRINCIPLE OF THE AIDVOR is a relatively short range radio navigational aid operating between 108 and 118MHz in the VHF band. It is a pilot interpreted aid comprising an airborne Navigation Receiver capable of being tuned to 100 or more frequencies and aConverter/Indicator which accepts signals from the navigation receiver translating them into simple indications on an instrument face. The airborne equipment is used in conjunction with a system of VOR beacons, most of them situated within the airways network.To understand the principles of VOR it is necessary to have a superficial knowledge of the radio wave itself.In the section on electro-magnetic energy the basic wave cycle was described (page 50). In essence the state of the electric current within a cycle (i.e. positive or negative strength) is constantly varying with time. Indeed at any particular time the development of the wave may be identified e.g. half maximum positive rising: maximum negative: zero raising to positive etc. As already explained such a state of development is known as a Phase.Imagine a radio beacon designed to radiate two beams, one running north and the other running south. And suppose each beam consists of two waves, the north beam emitting its phases in unison and the south beam with its waves at opposite phases (Fig. 41). An electronic device capable of measuring the difference in phase between two radio waves would, in this case be able to tell the operator when he was within the north beam or south beam. In other words the equipment is able to compare the differences between the phases of two simultaneously transmitted waves and since it uses this principle VOR is known as a Phase Comparison aid.
Fig. 41.THE VOR TRANSMITTERUsing the principle of phase comparison the VOR radiates a Reference Signal (REF) in all directions, its phase remaining constant throughout the reception area. A second signal, transmitted as a narrow beam, is arranged to sweep like a lighthouse through 360° (VAR Variable Signal). As it sweeps, the phase of the beacon is constantly altering so that its phase comparison with the fixed reference signal will change according to its position relative to the beacon (Fig. 42). In effect a VOR beacon emits an infinite number of beams or Radials through 360°, each possessed of unique differences in phase between the two signals. It therefore follows that with the air of equipment designed to measure or compare the two phases and translate these into headings from the beacons (radials), a pilot would be able to locate his aircraft in relation to the known position of that beacon. The VOR Beacon is adjusted to transmit radials related to Magnetic North.
Fig. 42.In a next post I'll explain the ground installation and the frequency used.

Oscilloscope
|
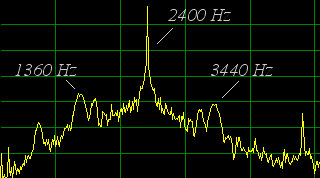
Spectrum
|
|---|---|
 |
 |
Oscilloscope
|
Spectrum
|
|---|---|
 |
 |

